Solution
To hide the annoying, unnecessary, pixel eating right panel in Acrobat Reader DC:
- Close the Acrobat Reader DC
- Go to: C:\Program Files (x86)\Adobe\Acrobat Reader DC\Reader\AcroApp\ENU
- Create a folder named “Disabled” inside the folder.
- Move Viewer.aapp into that folder..
If you are not interested in my rant you can close your browser tab right now.. 🙂
My Rant
I’ve been using Foxit Reader for a long time. It has been “OK” until printing pages started to take infinite.. It has tabbed GUI, however you have to select one between tabbing vs open in new window. If you want to drag a tab out of the stack, it would not allow you to do so.. It only rearranges the tabs.. Weird but I’ll live..
I am really confused why the software developers are really blind to what is obvious.. I see this pattern in every software.. Developers are eager to play with new features but they are really bad at fixing bugs, removing knots, cleaning weeds..
Last week, with the reinstall of Foxit Reader, printing a few pages took infinitely long.. I am not sure the new version or some last versions have this “feature”, because I haven’t been printing PDFs for a long time to feel as if I am not a part of the crime of killing trees..
I suspected of my old Wifi connection. My Wifi settings tells me the connection is at 300Mb however I have been only seeing 1MB/s with LinkSys e900.. It’s funny that my internet connection is much faster than this gimmick access point’less.. I connected my gigabit ethernet and tried reprinting, no, it was not the connection..
I tried Adobe Acrobat Reader DC and its printing speed was acceptable even with my 300Mb on screen, 8Mb at most e900 connection..
In the past Acrobat Reader was too slow. Its name “acrobat” would be like a child’s answer to the question: What will you be when you grow up. Adobe would be acrobat some day.. :))
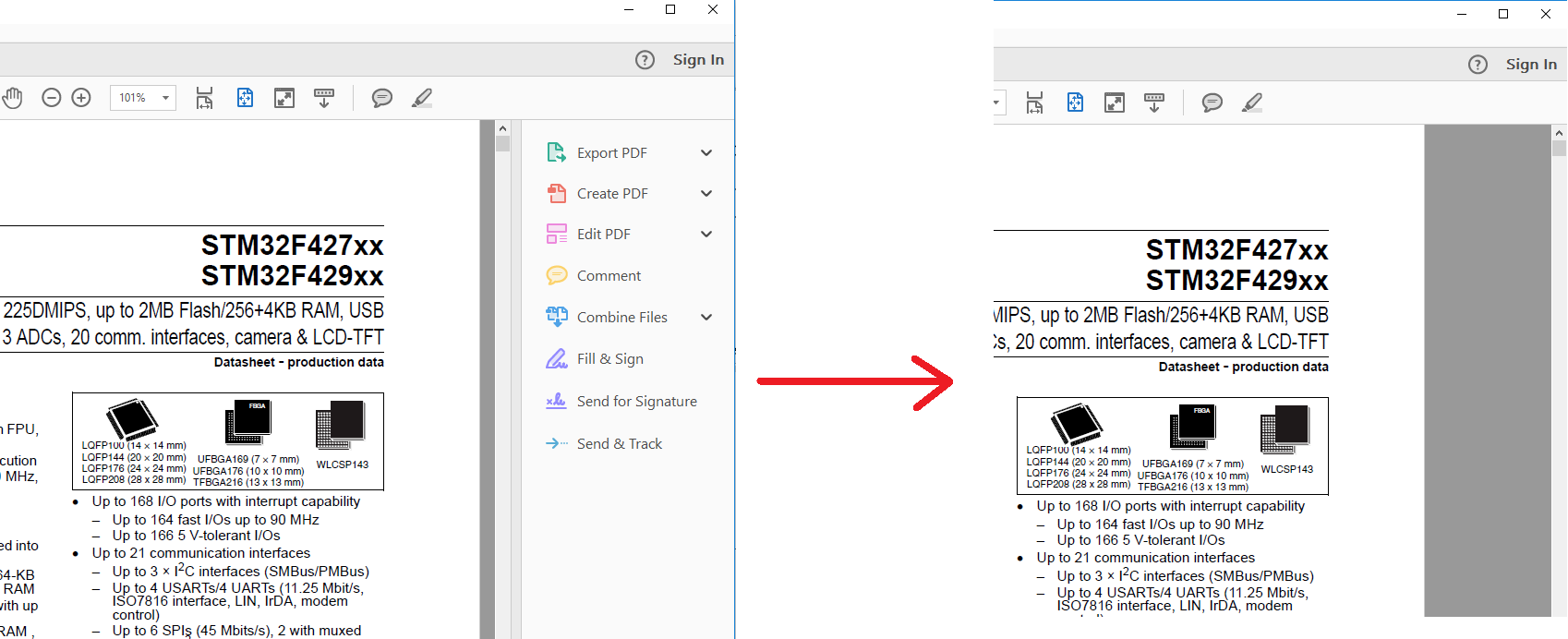
I don’t know if we started to have SSD’s, gigabytes of memory, fast CPU’s as a standard, but this time Acrobat Reader was not that much slow at all. As usual, no software gives you what you want without giving you some stupid annoyance. With Acrobat this was the side bar:
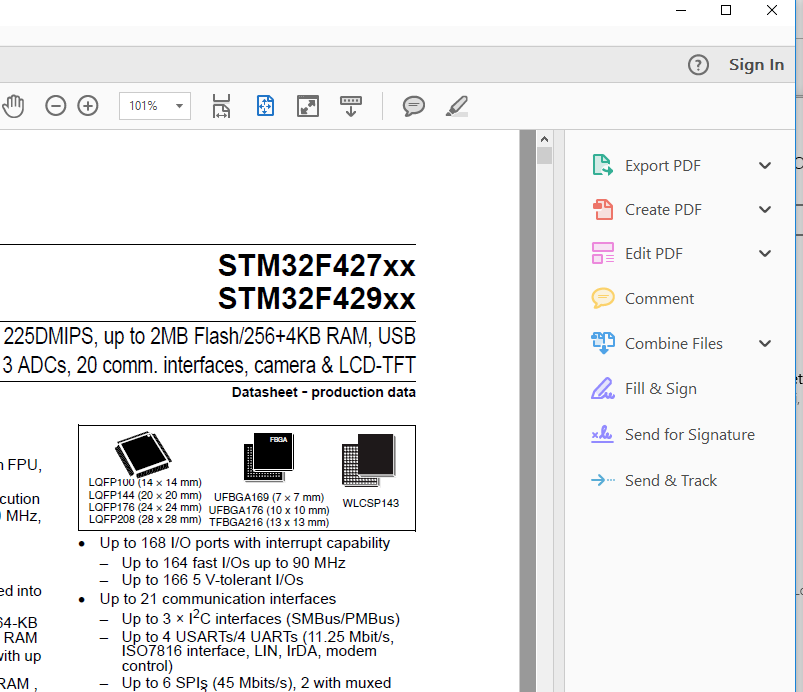 You may hide side bar by clicking the separator between the document and the bar, however if you open another document it comes back.. There is no option to hide it, kill it, trash it permanently.. Each time user opens a new document, it resurrects and says “hello, not this time”.. User have to click the separator to hide it again. What a waste of precious space and time! This time, space and time is connected though…
You may hide side bar by clicking the separator between the document and the bar, however if you open another document it comes back.. There is no option to hide it, kill it, trash it permanently.. Each time user opens a new document, it resurrects and says “hello, not this time”.. User have to click the separator to hide it again. What a waste of precious space and time! This time, space and time is connected though…
I run into this every where, sites with unnecessary stationary banners, annoying big buttons. The most successful waster company could be Google. Try Google App’s or whatever name it has now. You would see top of the screen is eaten by the app to show you the buttons/information you never use.. Do software developers use #@!@#!!234234 number of 27″ 4K monitors? If I were the manager of those companies, I’ll force them using 1280×800 resolution MacBook Pro for a day in a week to make the developers feel why every pixel and any user convenience is important..
Developer! Be respectful to our pixels, clicks, time and patience.